|
|
|
|
2022.04.24
カテゴリ:仕事
次期バージョンの加速度&傾き計測アプリ( Sensor )を開発中です、、、 外観も少し手をいれますが、 メインは、GPSモードの実装です。 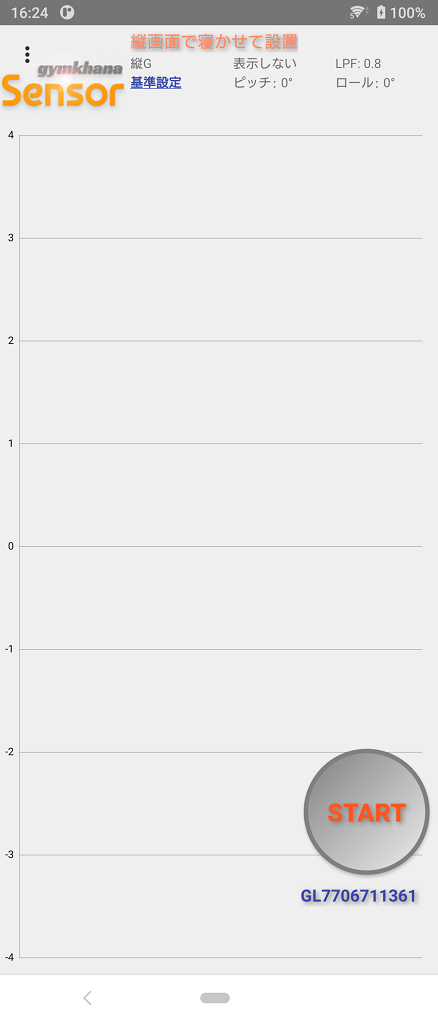 傾き(ピッチ&ロール)は従来通りですが、 加速度をGPSセンサーの位置情報と速度をから算出します。 縦Gは、v / s で求まります。 横Gは、v * v / r で求めます。 rは、v * s * 360 / (2 * 3.14 * a)で求めます。 aは、方位角で2点間の位置情報から求めます。 これが、リアルタイムだと難しい、、、 ましてや、内蔵GPSセンサーだと、 位置情報と速度の更新レートが最大1Hzで、 普通に実装すると、 グラフが1秒毎にしか更新されない、、、 最大1Hzという部分が、 微妙な部分で、位置検出で位置が変わらなければ、 5秒に1回とかそんな感じの仕様のようです、、、 ということで、 移動間を補完する実装が必要で、 直近3点を使って、B-スプラインで補完。 補完した仮想位置を使って、 加速度を計算するとか、 実に面倒ですね、、、 LNSプロファイルのGPSロガーは 直接接続させるようにしたりとか、 疑似ロケーションで内蔵GPSをMockさせたときも 動作するようにしてます。 ちょうど、このあたりの実装が終わったところで GPSモードのグラフ化の部分の実装はこれからです。 センサーだと、スマホをフリフリしてテストできたけど、 GPSだと、スマホをもって移動しないといけないから ちょっとテストは面倒だなぁ、、、 お気に入りの記事を「いいね!」で応援しよう
最終更新日
2022.04.24 17:03:09
コメント(0) | コメントを書く
[仕事] カテゴリの最新記事
|
![[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]](https://hbb.afl.rakuten.co.jp/hgb/21396ce2.f686e202.21396ce3.0786bb07/?me_id=1191568&item_id=10006192&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Fida-online%2Fcabinet%2Fgps14%2F770.jpg%3F_ex%3D240x240&s=240x240&t=picttext "[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]")




