二足歩行ロボット製作過程1
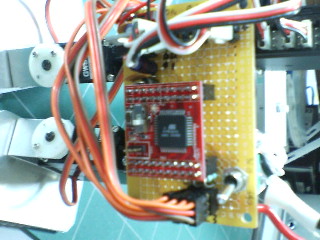
上の画像は本を参考に作った基盤になります。といっても脳みそとなるCPUは作れませんので、アトメル社のATmega32というマイコンを通販で注文して使用しています。このマイコンは10万回以上プログラムの書き換えができるそうです。基盤の製作が必要な理由は、マイコンが5Vで動くので9Vの電池から電源を取り、それを5Vまでさげてやる必要があるからです。そのための電子部品が5Vレギュレータとコンデンサ、ダイオードです。少ない部品をハンダ付けするだけですので、ハンダの経験がある人には苦にならないでしょう。あとはサーボを挿すピンをハンダ付けと、サーボ用バッテリーの配線をハンダ付けするだけです。本のとおり作ると、基盤はギリギリなので少し手間取るかもしれません。内容は簡単なんですがね・・・σ(^◇^;) くわしく知りたい方はこちらをご覧下さい。ハンダ付けやアルミの切断は無理だけど、プログラムを組んでロボットを動かしたいという方はこちらがお奨めです。構造の勉強になりますよ。